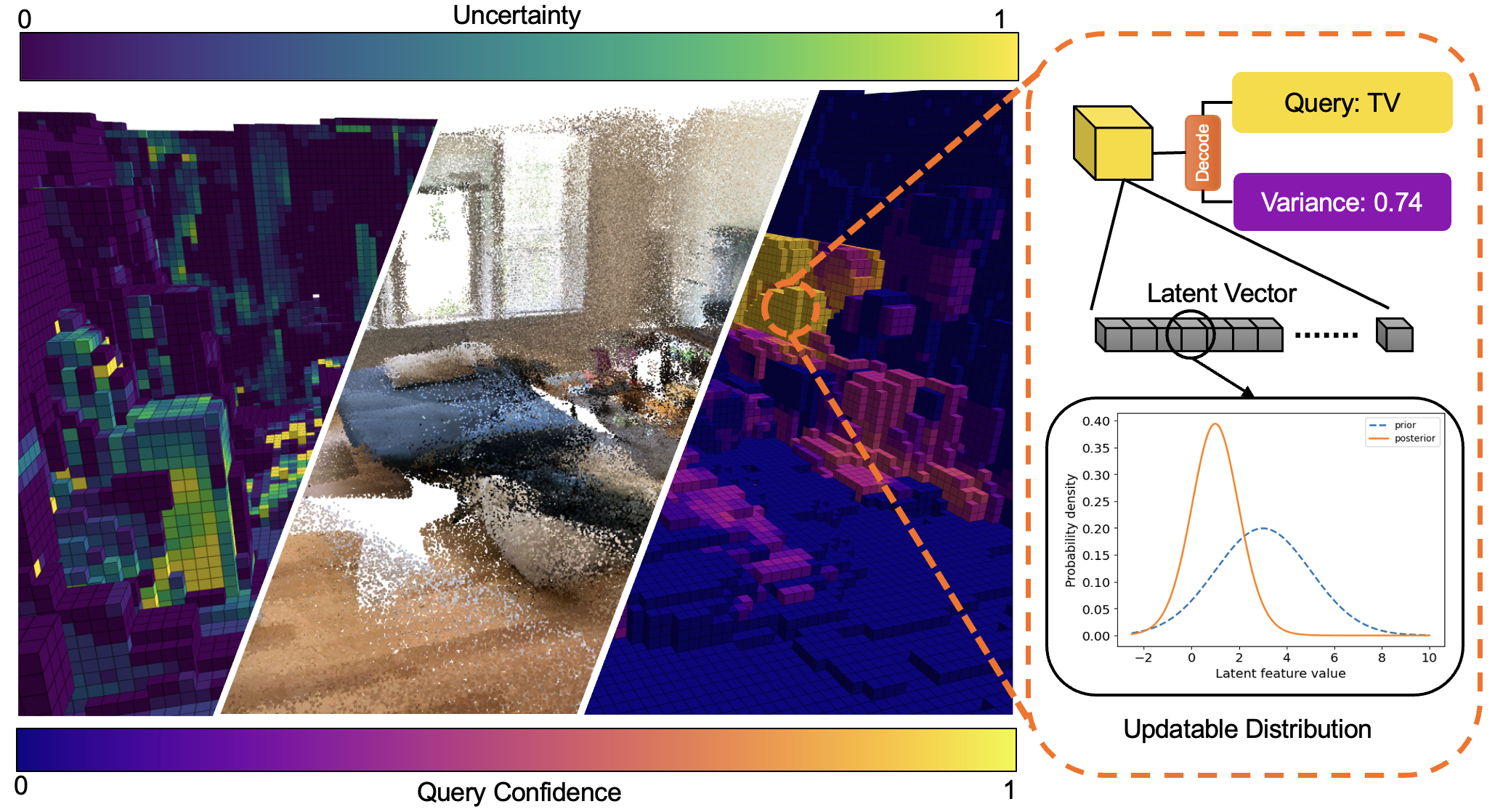
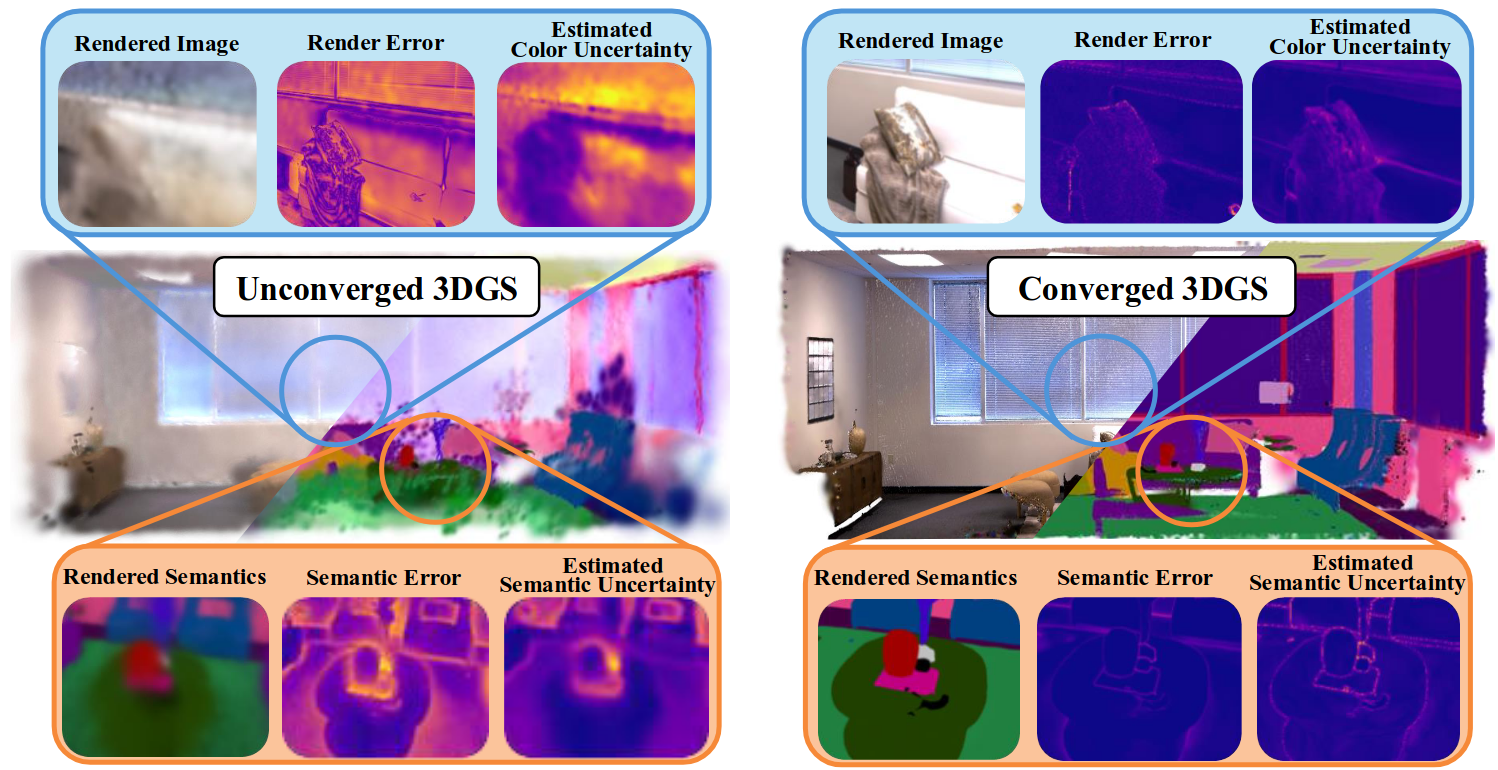
These Magic Moments: Differentiable Uncertainty Quantification of Radiance Field Models
A method for rendering higher-order moments for radiance fields.

A collection of research projects I have contributed to. My work mainly focuses on probabilistic semantic mapping and active perception.
For a full list of my pbulications, see my Google Scholar.